
Reducing Interventions
If you want to learn how we mitigate one of the biggest downsides of safe RL:
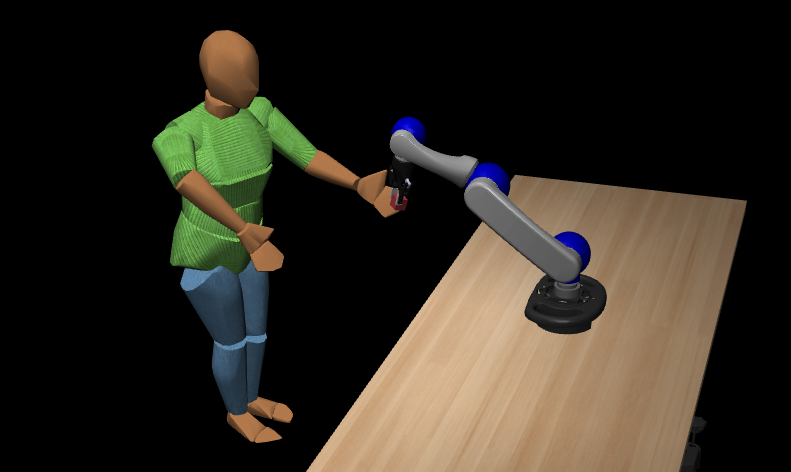
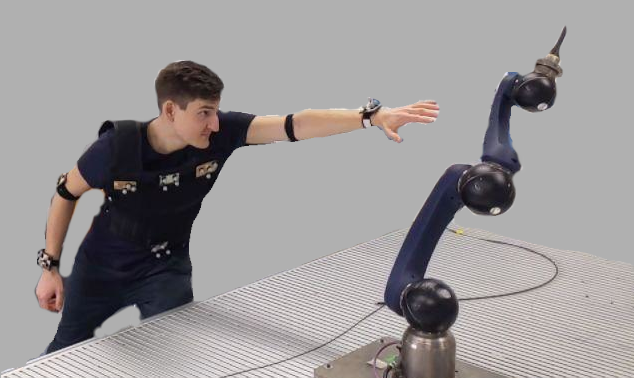
Human-robot-gym
Our benchmark for safe reinforcement learning in human-robot collaboration:
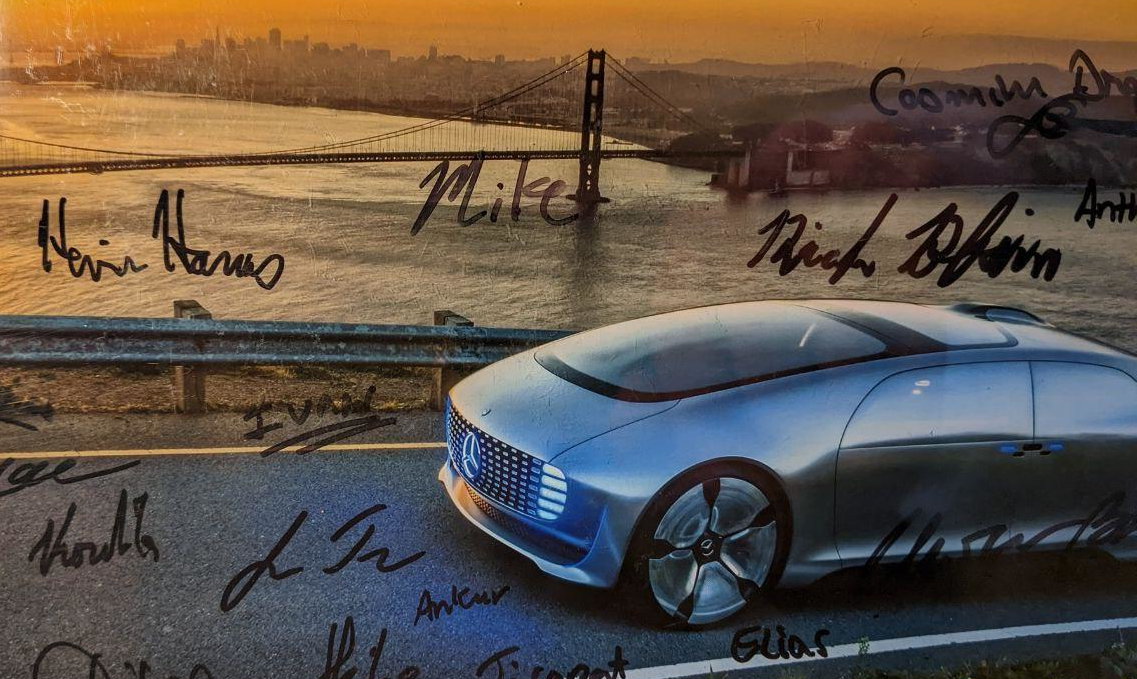
Autonomous Driving
In my internship at Mercedes Benz R&D North America, I developed a map converter to boost the performance of the simulation environment. Here are a few impressions:
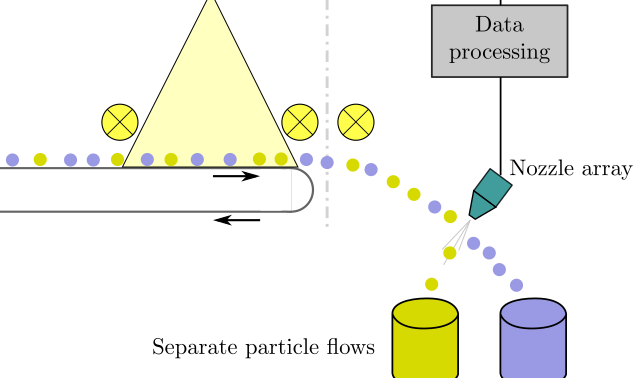
Optical Belt Sorting
During my master’s thesis I developed a mixture of experts of neural networks and Kalman filters to improve the accuracy of optical belt sorters. Check out the work here:
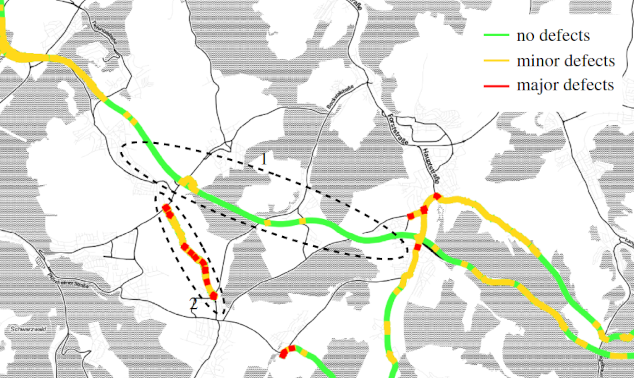
Road Condition Monitoring
In my bachelor’s thesis I developed a method to autonomously detect road damage with a fleet of different vehicles. See all publications that resulted from that work here: